





About
This system is composed of a beam attached to a motor, and a ball placed on the beam.
The ball is allowed to roll with one degree of freedom along the length of the beam. The control goal is to place the ball at certain desired position, by changing the beam angle.This kind of system type is often encountered in control applications. This unstable system is a good example for learning how control techniques can be applied to stabilize a plant.
Two different control strategies have been implemented: manual control and PID control.
Dpto. de Informática y Automática
E.T.S. de Ingeniería Informática, UNED
Juan del Rosal 16, 28040 Madrid, España
Translations
| Code | Language | Translator | Run | |
|---|---|---|---|---|
 |
||||
Credits

Carla Martn; Tan Wei Chiong; Loo Kang Wee
-
Executive Summary:
This document reviews the "Ball and Beam JavaScript Simulation Applet HTML5" resource available on the Open Educational Resources / Open Source Physics @ Singapore website. This interactive simulation provides a virtual environment for understanding a classic control system problem: balancing a ball on a beam by adjusting the beam's angle. The resource highlights the principles of Newtonian mechanics, the turning effects of forces, and introduces fundamental concepts in control theory, including manual and PID (Proportional-Integral-Derivative) control strategies. It is designed as a learning tool for students and a demonstration platform for educators, allowing users to manipulate parameters and observe their effects on the system's stability and behavior. The inclusion of real-time graphs visualizing key variables enhances the learning experience.
Main Themes and Important Ideas/Facts:
- Description of the System:
- The simulation models a "Ball and Beam" system, which consists of "a beam attached to a motor, and a ball placed on the beam."
- The ball has "one degree of freedom along the length of the beam," meaning it can only roll along the beam.
- The control objective is to "place the ball at certain desired position, by changing the beam angle."
- Relevance to Control Applications:
- The source explicitly states that "This kind of system type is often encountered in control applications." This emphasizes the practical relevance of the simulation.
- Demonstration of an Unstable System:
- The "Ball and Beam" system is identified as an "unstable system." This characteristic makes it a valuable tool for illustrating the need for and application of control techniques.
- It serves as "a good example for learning how control techniques can be applied to stabilize a plant."
- Implemented Control Strategies:
- The simulation features "Two different control strategies":
- Manual Control: Allows users to directly manipulate the beam angle.
- PID Control: Implements an automated control algorithm (Proportional-Integral-Derivative) to stabilize the ball's position.
- Learning Goals for Students:
- While the specific learning goals are marked as "[texthttps://iwant2study.org/lookangejss/02_newtonianmechanics_5turningeffectsofforces/ejss_model_BallAndBeam/BallAndBeam_Simulation.xhtml " frameborder="0"></iframe>
- This feature enhances its utility for online education and resource sharing.
- Attribution and Authorship:
- The simulation is attributed to Carla Martín from the "Dpto. de Informática y Automática, E.T.S. de Ingeniería Informática, UNED, Madrid, España."
- Credits are also given to Tan Wei Chiong and Loo Kang Wee, suggesting a collaborative effort.
- Licensing:
- The content is licensed under the "Creative Commons Attribution-Share Alike 4.0 Singapore License." This promotes open access and sharing with appropriate attribution.
- Commercial use of the "EasyJavaScriptSimulations Library" requires a separate license and direct contact with "This email address is being protected from spambots. You need JavaScript enabled to view it.."
- Links to External Resources:
- The "Version" section provides links to blog posts and alternative presentations of the simulation, offering additional context and information.
- Categorization within OER:
- The resource is located within the "Newtonian Mechanics" and "Turning Effects of Forces" sections of the Open Educational Resources / Open Source Physics @ Singapore website, indicating its primary subject matter. It is also listed under "Laboratorios Virtuales Interactivos," highlighting its nature as an interactive virtual laboratory.
Quotes from the Source:
- Description: "This system is composed of a beam attached to a motor, and a ball placed on the beam. The ball is allowed to roll with one degree of freedom along the length of the beam. The control goal is to place the ball at certain desired position, by changing the beam angle."
- Control Applications: "This kind of system type is often encountered in control applications."
- Unstable System: "This unstable system is a good example for learning how control techniques can be applied to stabilize a plant."
- Control Strategies: "Two different control strategies have been implemented: manual control and PID control."
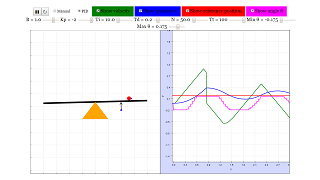
- For Teachers: "This simulation shows a ball balanced on a beam. The beam is controlled by a motor, and adjusts accordingly to the ball's location. The graph on the left shows the actual ball and beam, while the graph on the right shows the graphs of velocity (green), x-position (blue), reference position of the beam (red), and the angle between the beam and the horizontal (magenta) against time. Do play around with adjusting the different parameters with the sliders and see their effects on the system."
Conclusion:
The Ball and Beam JavaScript Simulation Applet HTML5 is a valuable interactive resource for learning about Newtonian mechanics, control systems, and the stabilization of unstable systems. Its clear description, implementation of different control strategies, real-time visualizations, and embeddable nature make it an effective tool for both students and educators. The attribution and licensing information promote its use and adaptation within the open educational resource community. Further exploration of the linked resources could provide deeper insights and pedagogical applications of this simulation.
Ball and Beam System Study Guide
Overview
This study guide focuses on the "Ball and Beam JavaScript Simulation Applet HTML5" resource from Open Educational Resources / Open Source Physics @ Singapore. The resource describes a simulation of a ball rolling along a beam that is controlled by a motor, aiming to place the ball at a desired position by adjusting the beam's angle. The system is presented as an example of an unstable system useful for learning control techniques.
Key Concepts
- Ball and Beam System: A mechanical system consisting of a ball free to roll along a beam that can be tilted by a motor.
- Control Goal: The objective of manipulating the beam's angle to position the ball at a specific desired location on the beam.
- Unstable System: A system that, without active control, tends to deviate further from its equilibrium state when disturbed. The ball rolling on a horizontal beam is an example; any slight displacement will cause it to roll off.
- Degree of Freedom: The number of independent parameters that define the configuration of a mechanical system. In this case, the ball has one degree of freedom: its position along the length of the beam.
- Control Techniques: Methods used to influence the behavior of a system to achieve a desired outcome, such as stabilizing an unstable system or reaching a target state.
- Manual Control: A control strategy where adjustments to the system (in this case, the beam angle) are made directly by a user.
- PID Control: A common automatic control loop mechanism widely used in industrial control systems. PID stands for Proportional, Integral, and Derivative, referring to the three separate terms whose sum constitutes the control action.
- Newtonian Mechanics: The study of the motion of macroscopic objects under the action of forces. The ball's movement along the beam is governed by Newtonian mechanics.
- Turning Effects of Forces: Also known as torque or moment, these effects cause rotation. The motor controlling the beam angle exerts a torque.
- Simulation: A model of a real-world system used for experimentation and understanding its behavior. The JavaScript applet provides a visual and interactive simulation of the ball and beam system.
- Parameters: Adjustable values within the simulation that affect the system's behavior. Examples include the beam's physical properties or the parameters of the PID controller.
- Graphs: Visual representations of data over time, such as the ball's position, velocity, beam angle, and reference position, provided in the simulation.
Quiz
- Describe the fundamental components of the ball and beam system as presented in the simulation. What is the primary objective of controlling this system?
- Why is the ball and beam system described as an "unstable system"? Provide a brief explanation of what this implies for its behavior without control.
- According to the text, what are the two main control strategies implemented in the Ball and Beam JavaScript Simulation? Briefly differentiate between these approaches.
- What does it mean for the ball in the simulation to have "one degree of freedom"? How does this constraint its movement?
- How does the motor in the ball and beam system influence the ball's position on the beam? What physical quantity is directly controlled by the motor?
- The simulation provides graphs of several variables over time. List at least three of these variables and briefly describe what information each graph conveys about the system's behavior.
- For whom is this simulation particularly useful as a learning tool, according to the "About" section? What specific topic is it intended to help illustrate?
- What is the role of adjusting "parameters" in the ball and beam simulation? What can users learn by experimenting with these adjustments?
- The resource mentions "Turning Effects of Forces" under Newtonian Mechanics. How is this concept relevant to the operation of the ball and beam system?
- Who are credited as the authors of the Ball and Beam JavaScript Simulation applet? Where are they affiliated?
Quiz Answer Key
- The ball and beam system consists of a beam attached to a motor and a ball placed on the beam, free to roll along its length. The primary objective of controlling this system is to place the ball at a desired position on the beam by changing the beam's angle.
- The ball and beam system is unstable because if the beam is perfectly horizontal, any slight disturbance will cause the ball to roll off without returning to its original position. It tends to deviate further from equilibrium without active intervention.
- The two main control strategies are manual control and PID control. Manual control involves direct user adjustments to the beam angle, while PID control is an automated feedback loop that calculates and applies corrections based on the ball's position.
- One degree of freedom means that the ball's configuration can be defined by a single independent parameter, which in this case is its position along the length of the beam. It is constrained to move only along this one dimension.
- The motor controls the angle of the beam. By changing the beam's angle, a component of gravity acts along the beam, causing the ball to accelerate and move along its length.
- Three variables graphed are: velocity (the rate of change of the ball's position), x-position (the location of the ball on the beam), and the angle between the beam and the horizontal (the tilt of the beam). These graphs show how these quantities change over time in response to control inputs or system dynamics.
- This simulation is particularly useful for learning how control techniques can be applied to stabilize a plant, referring to the ball and beam system as an example of an unstable system in control applications.
- Adjusting parameters allows users to observe how different factors influence the stability and controllability of the ball and beam system. By experimenting, users can gain an intuitive understanding of the system's dynamics and the effects of various control parameters.
- The motor exerts a torque (a turning effect of force) on the beam to change its angle. This controlled rotation of the beam is crucial for influencing the forces acting on the ball and thus controlling its motion.
- The authors credited are Carla Martín from Dpto. de Informática y Automática, E.T.S. de Ingeniería Informática, UNED in Madrid, España, along with contributions from Tan Wei Chiong and Loo Kang Wee.
Essay Format Questions
- Discuss the concept of stability in the context of physical systems, using the ball and beam system as a specific example. Explain why the uncontrolled ball and beam system is considered unstable and the challenges this instability presents for achieving the control goal.
- Compare and contrast the manual control and PID control strategies as implemented in the Ball and Beam JavaScript Simulation. What are the advantages and disadvantages of each approach in the context of stabilizing the system and achieving the desired ball position?
- Explain how the principles of Newtonian mechanics govern the behavior of the ball on the beam. Consider the forces acting on the ball as the beam's angle changes and how these forces influence the ball's motion and the overall dynamics of the system.
- The Ball and Beam Simulation is presented as a valuable tool for learning about control techniques. Discuss how interacting with the simulation, observing the graphs, and adjusting parameters can enhance understanding of abstract control concepts and their practical application to an unstable physical system.
- Based on the description of the Ball and Beam system, discuss potential real-world applications where similar control challenges arise. How might the lessons learned from controlling a simple system like the ball and beam be relevant to more complex engineering problems involving unstable systems?
Glossary of Key Terms
- Actuator: A mechanical device used to control a system, such as the motor that adjusts the beam angle in this system.
- Control System: A set of components that manage, command, direct, or regulate the behavior of a device or system. The ball and beam with its control strategies form a control system.
- Disturbance: An unwanted input that affects the system's output. In the ball and beam system, a sudden push on the ball would be a disturbance.
- Equilibrium: A state where a system is balanced and experiences no net force or torque, thus remaining in its current state unless acted upon by an external influence. A ball on a perfectly level surface (ignoring friction) could be considered in equilibrium at any position.
- Feedback: A process where a portion of the system's output is returned to the input to influence its future behavior. PID control relies on feedback of the ball's position.
- Plant: In control theory, the system being controlled (in this case, the physical ball and beam apparatus).
- Reference Position: The desired location for the ball on the beam, which the control system aims to achieve.
- Stability: The ability of a system to return to its equilibrium state after being disturbed. An unstable system moves further away from equilibrium.
Sample Learning Goals
[text]
For Teachers
This simulation shows a ball balanced on a beam. The beam is controlled by a motor, and adjusts accordingly to the ball's location.
The graph on the left shows the actual ball and beam, while the graph on the right shows the graphs of velocity (green), x-position (blue), reference position of the beam (red), and the angle between the beam and the horizontal (magenta) against time.
Do play around with adjusting the different parameters with the sliders and see their effects on the system.
Research
[text]
Video
[text]
Version:
- http://weelookang.blogspot.com/2018/05/ball-and-beam-javascript-simulation.html
- http://www.euclides.dia.uned.es/simulab-pfp/curso_online/cap7_caseStudies/sec_ballBeam.htm by Alfonso Urquia and Carla Martin-Villalba
Other Resources
[text]
Frequently Asked Questions: Ball and Beam Simulation
What is the Ball and Beam system?
The Ball and Beam system consists of a beam that can pivot, driven by a motor, and a ball that is free to roll along the length of this beam. The primary objective is to control the angle of the beam to precisely position the ball at a desired location on the beam.
Why is the Ball and Beam system important in control applications?
The Ball and Beam system is a classic example of an unstable system frequently encountered in various control engineering applications. Its inherent instability makes it an excellent educational tool for understanding and applying different control techniques aimed at stabilizing a system.
What are the control strategies implemented in this simulation?
The JavaScript simulation features two distinct control strategies that users can explore: manual control, where the user directly manipulates the beam angle, and Proportional-Integral-Derivative (PID) control, an automated feedback mechanism used to stabilize the ball's position.
What can I learn from interacting with this simulation?
By using the Ball and Beam simulation, users can gain practical insights into the challenges of controlling unstable systems. They can observe the effects of different parameters on the system's behavior and learn how control techniques, particularly PID control, can be employed to achieve stability and desired performance.
What visual elements are included in the simulation?
The simulation provides a graphical representation of the physical Ball and Beam setup on the left side of the interface. On the right side, time-based graphs display key system variables, including the ball's velocity (green), the ball's x-position (blue), the reference position of the beam (red), and the angle of the beam relative to the horizontal (magenta).
How can I experiment with the simulation?
Users are encouraged to interact with the simulation by adjusting various parameters using the provided sliders. By observing the resulting changes in the system's behavior and the corresponding graphs, users can develop an intuitive understanding of the Ball and Beam dynamics and the influence of different control parameters.
Who developed this Ball and Beam simulation?
This JavaScript simulation was developed by Carla Martín from the Department of Computer Science and Automation at UNED (Spain), with contributions from Tan Wei Chiong and Loo Kang Wee.
Where can I find more information or access the simulation?
The Ball and Beam JavaScript Simulation Applet HTML5 is hosted on the Open Educational Resources / Open Source Physics @ Singapore platform. It can be embedded into webpages using the provided iframe code. Further information and access can be found at the listed versions: http://weelookang.blogspot.com/2018/05/ball-and-beam-javascript-simulation.html and http://www.euclides.dia.uned.es/simulab-pfp/curso_online/cap7_caseStudies/sec_ballBeam.htm.
- Details
- Written by Wei Chiong
- Parent Category: 02 Forces & Moments
- Category: 04 Turning effects of forces
- Hits: 6836