
About
For Teachers
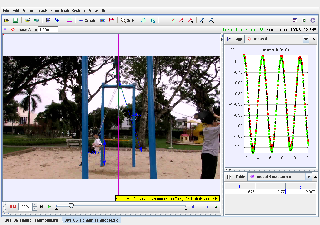
- PendulumSwingModelHannah1.mp4
Credits

Document Brief: Modeling Pendulum Swing Dynamics Using Tracker
This document explores the dynamics of a pendulum swing using Tracker’s modeling capabilities. The motion is described using polar coordinates and modeled with force functions representing angular motion, including damping effects. Key parameters such as mass (mm), gravity (gg), length (rr), and damping constant (kk) are incorporated into the model.
Purpose:
To analyze the pendulum swing dynamics, including angular displacement, angular velocity, and damping effects, using Tracker’s Model Builder.
Key Features:
- Motion tracked in polar coordinates (θ,r\theta, r).
- Force functions applied to model angular motion:
- Restoring force: Fθ=−m⋅g⋅cos(θ)−k⋅ω⋅rF_\theta = -m \cdot g \cdot \cos(\theta) - k \cdot \omega \cdot r.
- Radial force: Fr=−m⋅r⋅ω2F_r = -m \cdot r \cdot \omega^2.
- Graphical analysis of angular displacement (θ\theta) vs. time (tt).
Study Guide: Modeling Pendulum Swing with Tracker
Learning Objectives:
- Understand the forces acting on a pendulum swing in polar coordinates.
- Analyze the effects of gravity and damping on the pendulum’s angular motion.
- Validate the modeled motion against experimental data.
Step-by-Step Guide:
-
Setup and Calibration:
- Import the pendulum swing video into Tracker.
- Calibrate the scale using visible reference objects and define the coordinate system in polar form.
-
Tracker Motion Tracking:
- Track the pendulum bob’s position frame by frame.
- Record angular displacement (θ\theta) and length (rr) data.
-
Modeling with Force Functions:
- Open the Model Builder in Tracker.
- Define parameters and initial values:
- m=1.0m = 1.0 kg (mass).
- g=9.81g = 9.81 m/s2^2 (gravitational acceleration).
- k=0.02k = 0.02 (damping constant).
- Initial conditions: θ0=67∘\theta_0 = 67^\circ, ω0=−4.11∘/s\omega_0 = -4.11^\circ/\text{s}.
- Apply force functions:
- Fθ=−m⋅g⋅cos(θ)−k⋅ω⋅rF_\theta = -m \cdot g \cdot \cos(\theta) - k \cdot \omega \cdot r.
- Fr=−m⋅r⋅ω2F_r = -m \cdot r \cdot \omega^2.
-
Graphical Analysis:
- Plot angular displacement (θ\theta) vs. time (tt):
- Observe periodic oscillations and damping effects.
- Analyze angular velocity (ω\omega) for phase relationships with displacement.
- Plot angular displacement (θ\theta) vs. time (tt):
-
Applications:
- Use the model to study real-world damping effects in mechanical systems.
- Apply insights to pendulum-based systems like playground swings or seismometers.
Tips for Success:
- Ensure accurate tracking of the pendulum’s motion for reliable modeling results.
- Use small initial angles (θ<15∘\theta < 15^\circ) for SHM approximation, but the model handles larger angles with damping.
FAQ: Pendulum Swing Model in Tracker
1. Why use polar coordinates for this model?
Polar coordinates (r,θr, \theta) simplify the analysis of rotational motion, aligning with the pendulum’s natural movement.
2. What is the role of the damping constant (kk)?
The damping constant (kk) represents energy loss due to air resistance or friction, which reduces the pendulum’s amplitude over time.
3. How do force functions describe the motion?
- Fθ=−m⋅g⋅cos(θ)−k⋅ω⋅rF_\theta = -m \cdot g \cdot \cos(\theta) - k \cdot \omega \cdot r: Restoring force due to gravity and damping.
- Fr=−m⋅r⋅ω2F_r = -m \cdot r \cdot \omega^2: Centripetal force due to rotational motion.
4. Why is angular displacement (θ\theta) sinusoidal?
For small angles, the restoring force approximates SHM, resulting in sinusoidal angular displacement.
5. Can this model handle large angles?
Yes, the model incorporates non-linear terms, allowing analysis of larger angular displacements.
6. How is damping observed in the graph?
Damping is visible as a gradual decrease in the oscillation amplitude over time in the angular displacement (θ\theta) vs. time graph.
7. What are the practical applications of this model?
- Understanding playground swing dynamics.
- Designing pendulum-based systems like clocks or oscillators.
- Analyzing damping effects in engineering systems.
- Details
- Parent Category: 02 Newtonian Mechanics
- Category: 09 Oscillations
- Hits: 8458