
About
For Teachers
Credits
Rolling Systems 301 (RS 301) by Eka Cahya Prima"
This document explores advanced rolling systems (RS) using theoretical and experimental approaches to understand the interaction between rotational and translational dynamics in various rolling configurations. The study delves into complex scenarios, including coupled rolling systems, varying geometries, and dynamic stability analysis, using Tracker software for precise motion tracking.
Study Guide:
Objective:
- Investigate complex rolling systems and their dynamics.
- Analyze interactions between multiple rolling objects or components.
Key Concepts:
-
Coupled Rolling Systems:
- Interaction between multiple rolling objects, such as cylinders in contact, affecting motion dynamics.
-
Dynamic Stability:
- Analyzing stability under non-ideal conditions like uneven surfaces or varying speeds.
-
Geometric Variations:
- Effects of non-cylindrical geometries on rolling behavior (e.g., ellipsoids or irregular shapes).
-
Energy Transfer:
- How energy distributes between components in coupled systems.
Experiment Overview:
-
Setup:
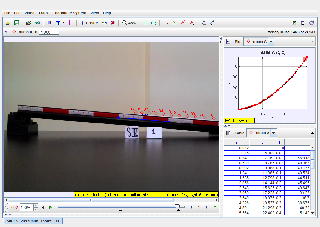
Rolling systems with varying geometries and materials are tested on inclined and flat surfaces. The experiments utilize Tracker software for motion analysis. -
Procedure:
- Roll coupled cylinders or varied shapes simultaneously.
- Alter surface conditions to study stability and resistance.
- Record motion with video equipment and analyze using Tracker software.
-
Observation Points:
- Interaction forces between coupled rolling objects.
- Stability under perturbations.
- Energy distribution and loss.
Questions to Consider:
-
How do coupled rolling systems influence each other’s motion?
- Answer: Interactions between objects, such as friction and force transfer, alter their acceleration and stability.
-
What factors contribute to dynamic stability?
- Answer: Mass distribution, contact surface properties, and rolling speed influence stability.
-
How does geometry affect rolling behavior?
- Answer: Non-cylindrical shapes have varying moments of inertia and contact dynamics, leading to unique rolling paths.
-
What is the role of surface conditions in rolling systems?
- Answer: Surface roughness and incline angles affect friction, resistance, and overall motion.
-
Can energy conservation principles be applied in coupled systems?
- Answer: Yes, though energy dissipation due to friction or deformation must be accounted for.
Applications:
- Mechanical Engineering: Designing rolling mechanisms in machinery and robotics.
- Material Science: Understanding surface interactions and energy loss in materials.
- Physics Education: Demonstrating advanced concepts in rotational and translational dynamics.
FAQ:
-
Why study rolling systems at this level?
- To tackle real-world complexities involving coupled dynamics, irregular shapes, and practical stability challenges.
-
What tools complement Tracker in this analysis?
- Surface profilometers, high-speed cameras, and force sensors enhance experimental precision.
-
What challenges might arise with coupled systems?
- Synchronizing motion and accurately measuring interaction forces can be difficult.
-
How can Tracker software assist?
- Tracker provides high-resolution data for displacement, velocity, and angular velocity, aiding in detailed analysis.
-
How are findings from RS 301 applied practically?
- Applications include wheel design, conveyor systems, and rolling mechanisms in robotics and transport.
Research
http://scitation.aip.org/
- Details
- Parent Category: 03 Motion & Forces
- Category: 02 Dynamics
- Hits: 6629